Engineering systems where mechanical precision meets embedded intelligence — from Class III implantable devices to parallel-kinematic robots.

I am a Mechatronics and Mechanical Engineer operating at the convergence of hardware design, embedded systems, and regulated manufacturing. My work spans Class III invasive medical devices, cable-driven parallel robots, spherical manipulators, and large-format additive manufacturing systems.
With an M.Eng from the University of British Columbia and experience at Resonetics Canada as an R&D Mechanical Design Engineer — owning the full path from new product development and process validation through production line creation, QMS documentation, and manufacturing team leadership — I bring both deep technical capability and the discipline that safety-critical environments demand.
I design systems that close the loop: from mechanical architecture through electronics integration, firmware, and final validation in ISO 13485 environments. This cross-domain fluency — spanning R&D, manufacturing, robotics, and embedded systems — is rare, and it defines every project I take on.
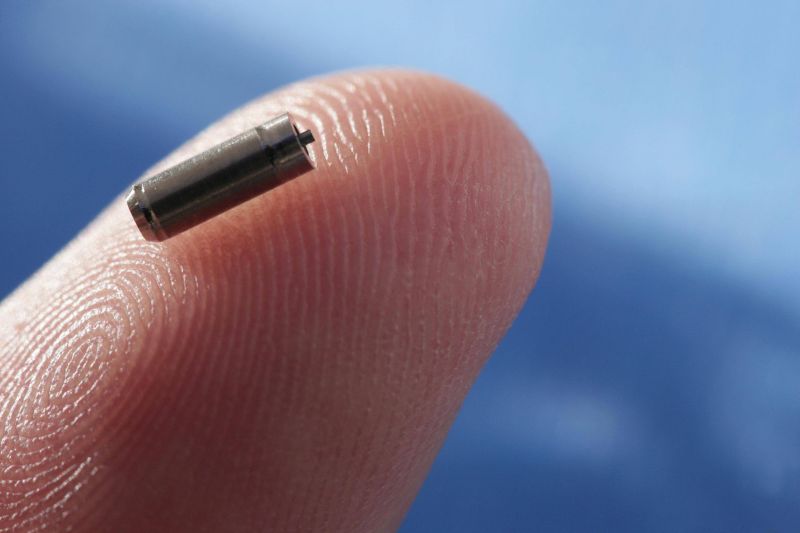

R&D Mechanical Design Engineer and Manufacturing Team Lead for Class III implantable battery systems powering pacemakers and neurostimulators for major global medtech companies — within a fully ISO 13485 / FDA-compliant QMS. Reported directly to R&D Director, bridging product development and manufacturing while leading a team of 4 engineers overseeing 50 production workers. Owned the complete path from new product development through production — designing and validating new processes (IQ/OQ/PQ, DHF/DMR), automating manual manufacturing processes, and driving root-cause analysis and CAPA resolution. Delivered measurable impact: reduced scrap from ~30% to ~2% and cut critical process time from 40 hours to ~20 minutes through system redesign, automation, and equipment retrofitting.
Led design and development of a cable-driven concrete 3D printing system targeting ~10,000 sq ft construction scale. Progressed from independent consultant to project lead, managing a team of 5 engineers and 2 technicians. Owned mechanical and system design end-to-end — motion architecture, extrusion system, and vision-based path correction. Delivered a functional prototype within 14 months using under $100K of a $1M project budget through rapid prototyping, FDM-based development, and capital-conscious design.
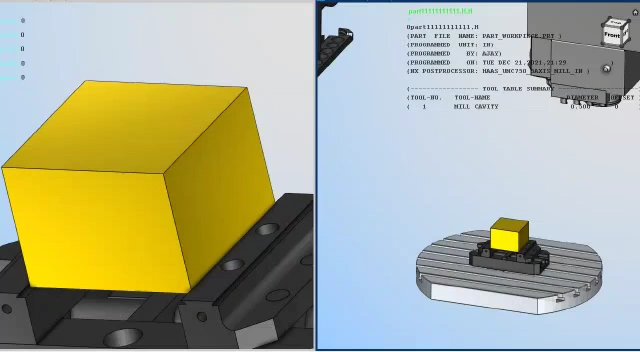
Research Analyst at BCIT's Advanced Additive Manufacturing Technology Hub, working across the full spectrum of digital manufacturing — from 5-axis CNC machining to polymer and metal additive processes (FDM, SLA, HP MJF). Led material research on copper-infused PLA filaments for FDM, resulting in a published research study on improving mechanical performance and printability. Hands-on across CAM programming, toolpath optimization, and fabrication, with contributions to biomedical and robotic system development within applied research and product development initiatives.
Designed and developed a 3-DOF spherical parallel manipulator, followed by a full system-level redesign to resolve mechanical, actuation, and control limitations. Diagnosed structural misalignment, actuator underperformance, and electronics failure — then rebuilt end-to-end covering mechanical validation, actuator selection, power architecture, and embedded control. Delivered a fully functional platform with stable motion: servo actuation, Raspberry Pi control, inverse kinematics modelled in Adams, and dual control modes — physical potentiometers and a digital app with slider-based and predefined position control via inverse kinematics.
Core contributor to an affordable, high-performance bionic prosthetic hand — spanning mechanical design, system integration, and product optimization. Delivered 18 grip modes and ~8 kg load capacity using custom actuation and embedded systems. Drove cost reduction from ~$30K–60K to under $3K through CAE, rapid prototyping, and design simplification. Led coordination between mechanical and electronics teams, developed under ISO 13485 standards for real-world deployment in cost-sensitive markets.


Designed, built, and competed with Formula-style kart and BAJA all-terrain vehicles as part of student design teams — working across the full vehicle lifecycle: chassis design, suspension geometry, powertrain integration, and vehicle dynamics tuning. Hands-on fabrication using lathe, milling, welding, cutting, and tube bending alongside CAD/CAE-driven design validation and CNC-machined custom components. Responsible for design engineering, cost analysis, budget planning, and compliance with BAJA technical rules and safety standards. Competed in SAE India BAJA — a large-scale endurance event with rigorous technical inspection validating both engineering design and build quality.
ISO 13485 process design, validation (IQ/OQ/PQ), DHF/DMR documentation, and Class III manufacturing support — for companies navigating FDA-regulated product development.
From concept to detailed design — DFM, FEA, mechanism design, and system integration for medical devices, robotics, or industrial applications.
CNC, additive manufacturing, process optimization, scrap reduction, and lean manufacturing implementation — from small-batch to production scale.
Parallel and serial manipulator design, embedded control systems, cable-driven architectures, and full prototype development from kinematics to working hardware.
Remote R&D engineering support on retainer — senior engineering judgment, technical leadership, and cross-functional coordination for startups that need expertise without a full-time hire.
Have a project in mind? Looking for a remote engineering partner? Get in touch — I respond within 24 hours.